每个轴都配备了伺服驱动器和电机,有时还包括齿轮箱或末端执行器来增强控制力。这些组件通过网络,通常是工业以太网,实现互连。以太网以其线路拓扑结构,为机器控制器与各伺服轴之间提供了高效的通信途径。
控制周期是这些应用运行的核心,它通常与伺服电机驱动器的基本控制周期或其倍数相等。在这个周期内,控制器必须将新的位置参考和其他相关信息传输到网络中的每个节点。每个节点随后在PWM周期内,利用新的数据更新伺服控制算法,以确保精确的运动控制。
网络传输延迟是影响控制性能的关键因素。在理想情况下,网络上的唯一流量是循环数据。延迟主要来自网络数据速率、网络跃点数以及每个节点中的处理延迟。对于工业应用,信号在导线中的传播延迟通常可以忽略,主要延迟是带宽延迟,即数据在网络上传输所需的时间。
随着工业以太网技术的发展,低延迟的解决方案变得越来越重要。例如,ADI公司推出的新型工业以太网PHY,专为恶劣的工业环境设计,能够在高达105°C的环境温度下可靠运行,并提供业界领先的低功耗和延迟性能。
在实际应用中,每个轴节点的帧传输时间包括了物理接收、物理层传输、帧解析等多个环节。这些延迟因素对整个系统的性能有重大影响。例如,在一个7轴的线路网络中,若将所有延迟因素聚合起来,总传输延迟可能会占据控制周期的大部分时间。
为了优化性能,减少传输时间至关重要。这可以通过使用低延迟的PHY和嵌入式直通交换机来实现。此外,迁移到千兆以太网也可以显著降低带宽延迟的影响,但可能会增加交换机和PHY组件引入的总体延迟比例。
总之,在多轴、同步运动的高性能应用中,控制时序的精确性、确定性和时间关键性至关重要。为了满足这些要求,最大限度地减少端到端延迟是关键。低延迟的PHY和嵌入式直通交换机成为了优化这些系统性能的重要元素。随着工业系统向更高速度、更短控制周期和更多节点的方向发展,这些技术的应用将变得越来越重要。
工业机器人和机床应用涉及空间中多个轴的精确、协调运动,以完成手头的工作。机器人通常有六个轴需要以协调的方式控制,如果机器人沿着轨道移动,有时有七个轴。在CNC加工中,5轴协调很常见,尽管有些应用利用多达12个轴,其中工具和工件在空间中相互移动。每个轴包括伺服驱动器、电机,有时还包括电机和轴关节之间的齿轮箱或末端执行器。然后,系统通过工业以太网互连,通常采用线路拓扑结构,如图1所示。机器控制器将所需的空间轨迹转换为每个伺服轴的单个位置参考,并通过网络循环进行通信。

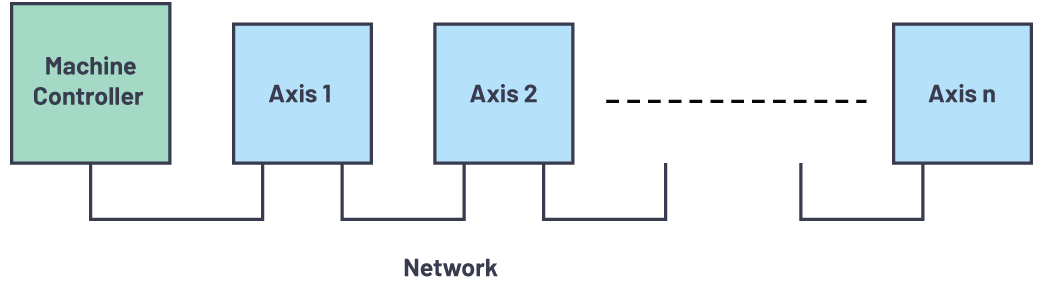
图1.多轴机床的网络拓扑。
控制周期
这些应用在定义的周期时间上运行,该周期时间通常等于底层伺服电机驱动器的基本控制/脉宽调制 (PWM) 开关周期或倍数。在这种情况下,端到端网络传输延迟是一个关键参数,如图 2 所示。在每个周期内,新的位置参考和其他相关信息必须从机器控制器传输到图 1 的每个节点。然后,每个节点在PWM周期内需要有足够的剩余时间,以使用新的位置参考以及任何新的传感器数据更新伺服控制算法计算。然后,每个节点通过依赖于工业以太网协议的分布式时钟机制在同一时间点在伺服驱动器中应用更新的PWM矢量。根据控制架构,部分控制环路算法可以在PLC中实现,并且需要足够的时间才能可用,通过网络接收任何相关的传感器信息更新。
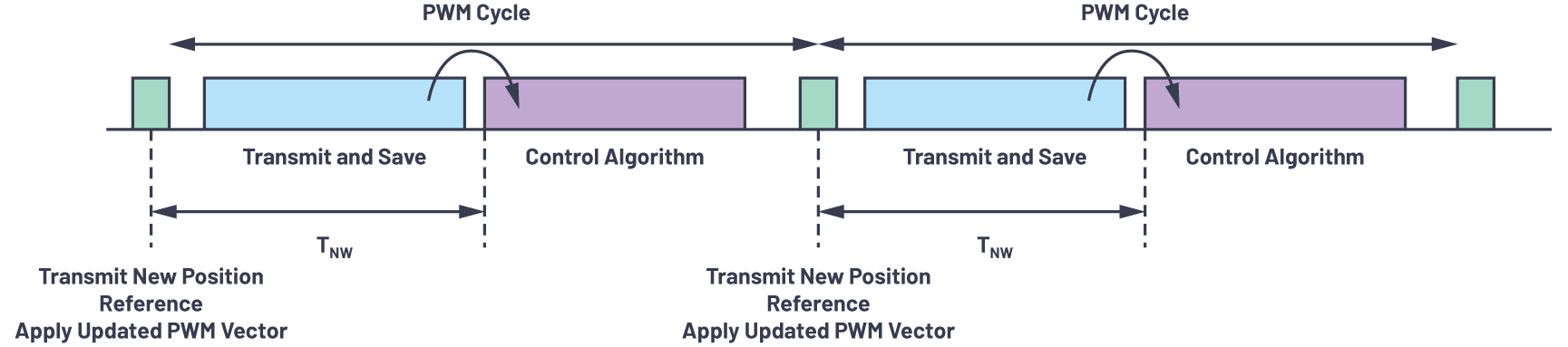
图2.PWM周期和网络传输时间。
数据传输延迟
假设网络上唯一的流量是机器控制器和伺服节点之间流动的循环数据,则网络延迟(T西北) 由到最远节点的网络跃点数、网络数据速率以及每个节点中遇到的延迟决定。在机器人和机床的背景下,信号沿导线的传播延迟可以忽略不计,因为电缆长度通常相对较短。主要延迟是带宽延迟;也就是说,将数据放到线路上所需的时间。对于最小尺寸的以太网帧(通常用于机床和机器人控制),图 3 显示了 100 mbps 和 1 Gbps 比特率的带宽延迟。这只是数据包大小除以数据速率。从控制器到伺服的多轴系统的典型数据有效载荷包括每个伺服的 4 字节速度/位置参考更新和 1 字节控制字更新,这意味着 6 轴机器人的有效载荷为 30 字节。当然,某些应用程序将在更新中携带更多信息和/或具有更多轴,在这种情况下,可能需要大于最小大小的数据包。
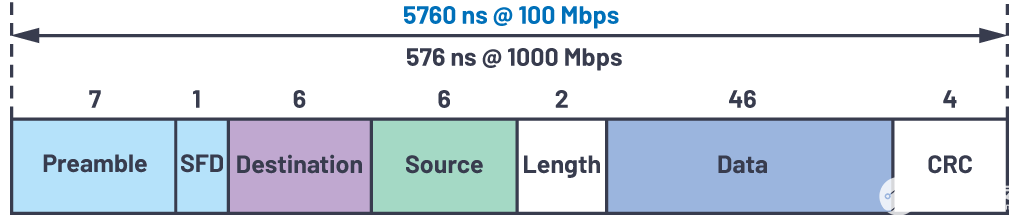
图3.最小长度以太网帧的带宽延迟。
除了带宽延迟之外,其他延迟元素是由于以太网帧通过每个伺服网络接口上的 PHY 和 2 端换机而发生的。这些延迟如图4和图5所示,其中帧通过PHY进入MAC(1-2),通过目标地址分析显示,其中只有帧的前导码和目标部分必须通过时钟。路径 2-3a 表示提取当前节点的有效负载数据,而路径 2-3b 表示帧到目标节点的后续旅程。图 4a 仅显示了在 2-3a 中传递给应用程序的有效负载,而图 4b 显示了正在传递的大部分帧;这表明以太网协议之间可能发生的微小差异。路径 3b-4 表示帧通过传输队列、PHY 并返回到线路上的出站传输。如图所示,此路径不存在于行端节点上。这里假设直通数据包交换,而不是存储转发,后者具有更高的延迟,因为整个帧在转发之前都进入交换机。
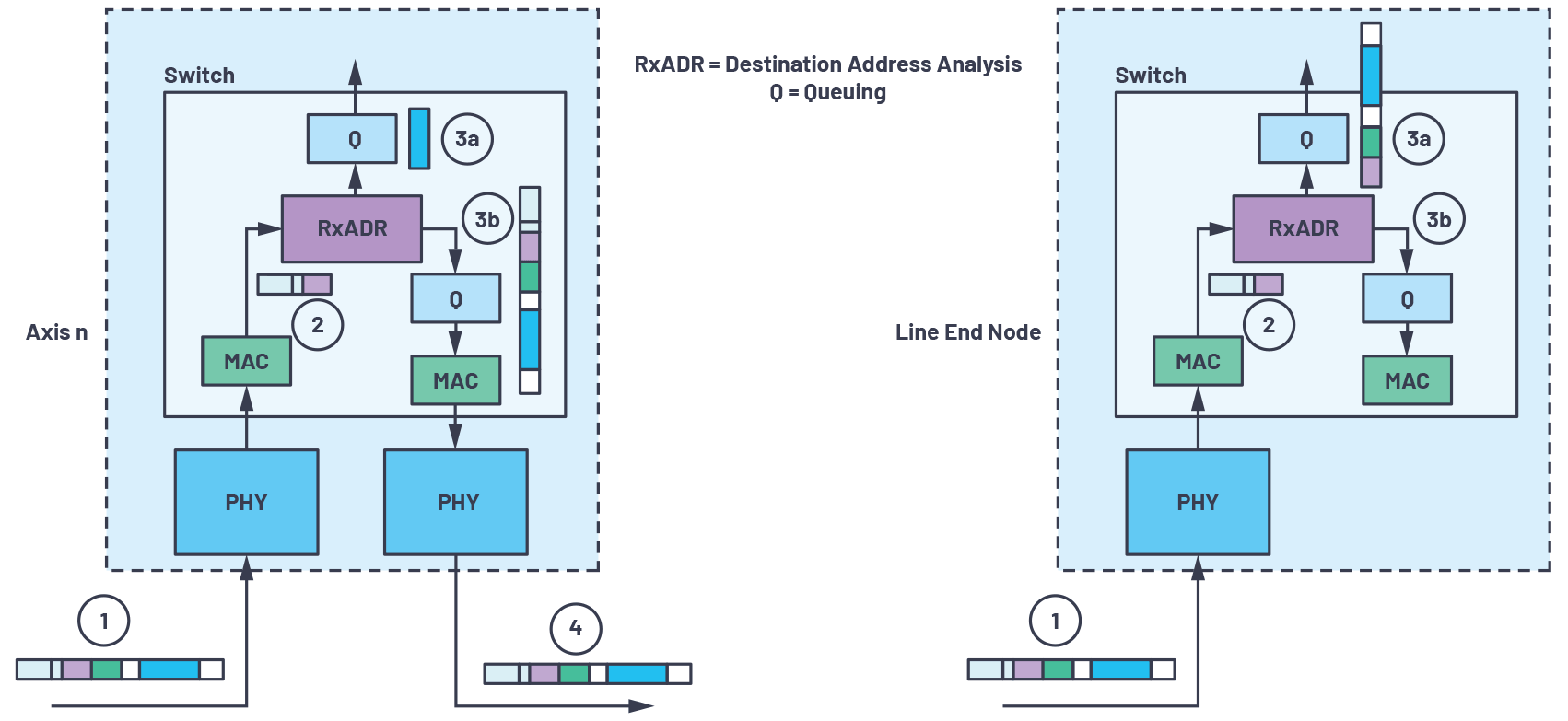
图4.帧延迟:(a) 2 端口节点帧延迟和 (b) 线路端节点。
图5还显示了帧的延迟元素,如图5所示,其中显示了通过一个轴节点的总帧传输时间。TBW表示带宽延迟,而 TL_1node表示帧通过单个节点的延迟。除了与通过线路的位物理传输和用于目标地址分析的地址位的时钟输入相关的延迟外,PHY和开关组件延迟是影响系统内传输延迟的其他因素。随着线路上比特率的增加和节点数量的增加,这些延迟在整个端到端帧传输延迟中变得更加重要。
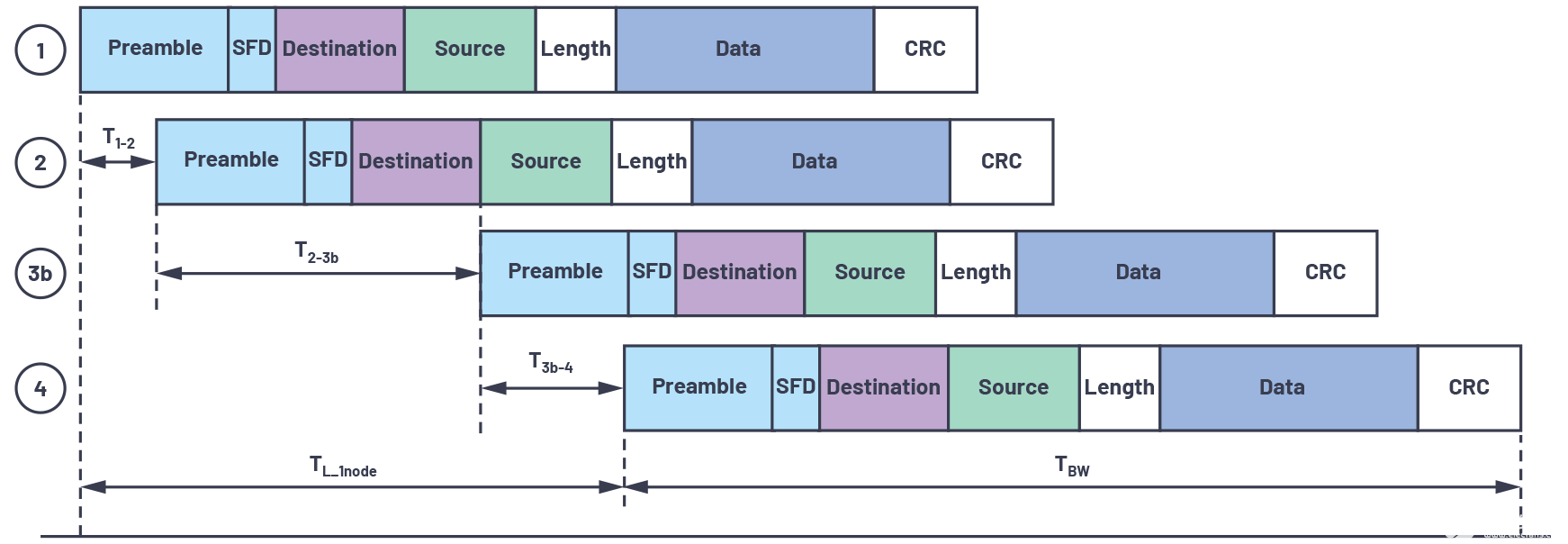
图5.帧传输时间轴。
低延迟解决方案
ADI公司发布了两款新型工业以太网PHY,设计用于在恶劣的工业条件下可靠运行,环境温度范围高达105°C,并具有业界领先的功耗和延迟规格。ADIN1300和ADIN1200专为应对本文概述的挑战而开发,是工业应用的理想选择。凭借fido5000实时以太网、多协议、嵌入式2端换机,ADI公司可为确定性时间敏感型应用提供解决方案。
表 1 列出了 PHY 和交换机引入的延迟,假设接收缓冲区分析基于目标地址并假设网络为 100 Mbps。
| 延迟元素 | 元件 | 时间 |
| 物理接收 | ADIN1200 | 248 纳秒 |
| 物理层传输 | ADIN1200 | 52 纳秒 |
| 切换前导码和目标 | 菲多5000 | 1120 ns(100 Mbps 时为 14 字节) |
| 切换 MAC、队列和接收器 | 菲多5000 | 330 纳秒 |
例如,将这些延迟聚合到7轴线路网络,并将全部有效载荷的时钟连接到最终节点(图4中的3a),总传输延迟变为

其中 58 × 80 ns 表示读取前导码和目标地址字节后剩余的 58 字节有效负载。
此计算假定网络上没有其他流量,或者管理网络以启用对时间敏感的流量的优先访问。它也在某种程度上依赖于协议,根据所使用的确切工业以太网协议,计算略有不同。回到图2,在周期时间低至50 μs至100 μs的机器系统中,到最远节点的帧传输可能占用近50%的周期,从而减少了可用于更新下一个周期的电机控制和运动控制算法计算的时间。最小化这种传输时间对于性能优化非常重要,因为它允许更长和更复杂的控制计算。鉴于与线路上数据相关的延迟是固定的,并且与比特率相关,因此使用低延迟元件(如ADIN1200 PHY和fido5000嵌入式开关)是性能优化的关键,尤其是在节点数量增加(例如12轴CNC机床)和周期时间缩短的情况下。迁移到千兆以太网可显著降低带宽延迟的影响,但会增加交换机和 PHY 组件引入的总体延迟比例。例如,千兆网络上的 12 轴 CNC 机床的网络传输延迟约为 7.5 μs。其带宽元素可以忽略不计,并且使用最小或最大以太网帧大小几乎没有区别。网络延迟在PHY和交换机之间大致平均分配,这突显了随着工业系统向千兆位速度发展、控制周期时间缩短(EtherCAT已证明循环时间为12.5 μs)以及节点数量随着控制网络中以太网连接传感器的添加和网络拓扑的扁平化而扩展的价值。
结论
在高性能、多轴、同步运动应用中,控制时序要求精确、确定性和时间关键性,需要最大限度地减少端到端延迟,尤其是在控制周期时间缩短和控制算法复杂性增加的情况下。低延迟 PHY 和嵌入式直通开关是优化这些系统的重要元素。
审核编辑:郭婷